




Je suis sûr qu'il existe des dizaines d'articles comme celui-ci qui traitent du même sujet, mais j'ai décidé d'apporter ma contribution à la lumière de l'expérience que j'ai acquise au cours des 30 dernières années dans le domaine de la cartographie marine, d'abord en tant qu'employé, puis en tant qu'entrepreneur.
Lorsque j'ai commencé à travailler pour Navionics au début des années 90 en tant que responsable de la production cartographique, nous étions vraiment à l'aube des cartes marines électroniques.

Il fallait un diviseur et un triangle, ou mieux deux, pour placer sa position sur la carte marine, peut-être à l'aide d'un Loran. Il fallait aussi tenir compte des différentes échelles de cartes.
Tout d'abord, dessinez votre position à la petite échelle (1:500 000), où la taille du stylo représente environ 150 mètres, afin de comprendre la position générale de votre bateau lorsqu'il est éloigné de la côte. Répétez ensuite l'opération à une échelle plus grande (1:80 000) en constatant qu'il existe une certaine différence entre les deux cartes, qui peut être due au dessin manuel effectué par le cartographe ou à l'absence de mise à jour du NTM. Ensuite, vous prenez vos jumelles pour découvrir que la bouée de référence est à un demi-mille de l'endroit prévu... le Loran a fonctionné ? Ai-je ouvert le diviseur à la bonne latitude sur la carte ? Combien de secondes représentent une minute ? Je n'ai jamais été aussi bon en dessin technique à l'école.
L'ancien mode mais....
L'avènement du GPS a fait passer toutes ces choses à un niveau d'information supérieur. Au départ, la précision du GPS n'était pas très élevée, mais la route était tracée.
Tous les bureaux hydrographiques du monde sont officiellement responsables de la création et de la mise à jour des cartes marines de leurs eaux territoriales. Les cartes marines, encore aujourd'hui malheureusement, sont conçues et construites pour la navigation commerciale et/ou militaire, c'est pourquoi il y a un manque dans la couverture des cartes à grande échelle. Nous parlons de plus de 20 000 cartes marines dans le monde.
J'éviterais de parler du processus précoce utilisant les grandes tables de numérisation et je décrirais le processus que la plupart des OH ont utilisé et, dans certains cas, utilisent encore.
Numérisation, géoréférencement, vectorisation et attribution... tout cela semble vieux aujourd'hui, mais c'était le processus pour générer la carte électronique à partir d'un morceau de papier. À la fin des années 90, toutes les organisations maritimes ont décidé de produire des cartes marines électroniques et ont créé la norme S-57, un format orienté objet avec des caractéristiques assez complexes (topologie, géométrie de partage, acceptation de la qualité, etc. Tous ont pris leurs cartes papier et ont suivi les étapes ci-dessus.
La qualité était une option... lors de la numérisation, il était difficile d'éviter une déformation de l'image résultante. Le papier des cartes marines est assez lourd et épais, un scanner normal ferait glisser la carte sur les rouleaux. Des scanners plats de taille A0, ou des scanners verticaux avec des rouleaux en téflon, un peu de R&D a été nécessaire.
Le géoréférencement et parfois la re-projection. Sélectionnez deux, quatre ou plus de points sur la grille. Obtenez la latitude et la longitude (jj, mm, ss.ss), convertissez-les en degrés décimaux avec au moins 6 chiffres décimaux pour garantir la précision du décimètre, appliquez la correction SHIFT to WGS84... exécutez.
Chargez l'image géoréférencée et commencez la vectorisation avec des outils manuels, semi-automatiques et automatiques. Dans les années 90, il n'y avait pas beaucoup d'outils automatiques pour ce processus, et ces quelques outils nécessitaient plus de travail pour corriger les erreurs que pour vectoriser manuellement la carte. Dessiner une ligne, placer un point, remplir un polygone... puis attribuer des attributs. Vous souvenez-vous de la caractéristique de la lumière ? FL 2s R 5M... clignotant 2 secondes, rouge 5 milles nautiques... tout cela devait être divisé en 4 attributs (Caractéristique du feu, Période, Couleur, Visibilité) de l'objet FEUX. Sur la carte papier, la ligne de côte (une polyligne) représentait la fin de la terre et le début de l'eau, juste une ligne dessinée sur le papier. Dans le S-57, elle est utilisée pour créer au moins 3 objets : la zone terrestre, la première zone de profondeur et la ligne côtière. Ces trois objets doivent partager la même géométrie le long de la côte. Ceci n'est qu'un exemple de la complexité du processus à utiliser pour générer les cartes électroniques.
Mais tout cela n'était que la conversion d'une carte papier provenant d'un relevé effectué avec un sondeur à simple faisceau (dans le meilleur des cas, il existe encore des centaines de cartes utilisant des relevés vieux d'un siècle, voire plus, effectués avec une vérification manuelle de la profondeur à l'aide d'une corde) et peut-être d'un Loran pour obtenir la position. Au début des années 2000, la plupart des OH étaient équipés de sonars multifaisceaux et de GPS différentiels... et ont commencé à travailler sur l'imagerie satellitaire... Aujourd'hui, nous disposons de lidars d'avion, d'imagerie à balayage latéral, de lidars satellitaires... mais la plupart des cartes électroniques disponibles sur le marché sont encore issues de la conversion papier.
Les cartes marines électroniques sont toujours disponibles en deux formats : raster et vectoriel. Même si certaines administrations commencent à envisager de supprimer la version matricielle (ainsi que le papier) et de ne conserver que le produit vectoriel et le processus de production/maintenance.
Leformat mat riciel est une mosaïque d'images géoréférencées affichées sur un écran de navigation sans possibilité d'interaction avec les cartes.
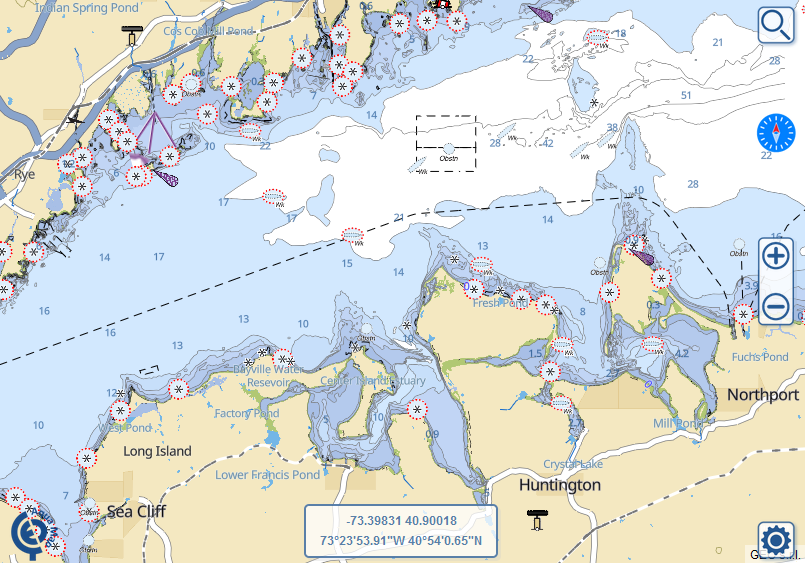
Leformat vectoriel est une intégration d'objets géométriques (points, lignes et polygones), chacun stockant plusieurs attributs. Ce format permet de nombreuses interactions entre l'utilisateur/l'application et la carte. Le logiciel qui sous-tend cette interaction pourrait aider l'utilisateur, en théorie, à modifier n'importe quel élément d'information présent dans les données, selon son choix, parmi lesquels : changer la couleur d'un objet, changer la forme d'un symbole, redimensionner n'importe quel objet et texte à l'écran, demander l'émission d'une alarme à proximité d'un objet, changer l'unité de mesure (pieds > mètres > pieds).
Au cours des 30 dernières années, nous avons fait un grand pas en avant dans cet environnement et nous pouvons dire aujourd'hui "presque" bye-bye aux cartes papier. Toutes les cartes papier sont désormais disponibles sous forme électronique et tous les chefs d'exploitation sont désormais habitués à travailler sur un flux de cartes électroniques, depuis le relevé jusqu'au produit final. Cela a pris plus de 20 ans, ce qui est énorme à notre époque.
Nous espérons que l'avenir inclura bientôt les solutions IoT (Internet des objets) : Des capteurs LIDAR placés le long des principales voies navigables (par exemple l'AICW) pour découvrir en temps réel les hauts-fonds pendant la navigation, des capteurs de pont pour obtenir en temps réel la hauteur libre du pont... plus de table des marées pour calculer plus ou moins si je peux passer par ce pont... et les communautés pour être en mesure de partager en temps réel des informations sur leur navigation actuelle (vent, courant, profondeur,...) ainsi que pour mettre en évidence en temps réel tout problème potentiel (souche, débris, coulé,...).
Giorgio Ghiggini, équipe Aqua Map.

